
科研项目
核聚变环境下遥操作维护系统
发布日期:2019-09-20 浏览次数:3104
核聚变环境下遥操作维护系统简介
遥操作维护系统是未来聚变堆运行必不可少的关键子系统,也被公认为是通往商用托卡马克聚变堆之路上必须解决的关键问题之一。尽管近年来国内外针对托卡马克的遥控机器人作业系统已经开展了许多工作,但对于托卡马克高温、真空、强辐射环境下的遥操作机器人方面仍存在亟需解决的难题。主要的科研项目有EAST多关节遥操作维护系统研究和未来聚变装置(CFETR)遥操作技术研究。
EAST多关节遥操作维护系统研究
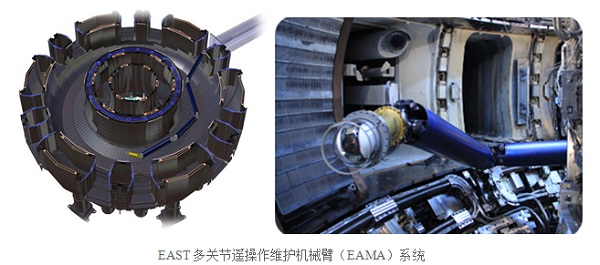
EAST多关节遥操作维护机械臂系统旨在不破坏真空环境的条件下对内部部件进行近距离观测和维护,对保障EAST的安全运行、提高实验效率及有效运行时间起着非常重要的作用。目前我室基于中法联合实验室国际平台,同时以EAST高温、高真空实验环境为基础,开展遥操作维护系统相关集成设计及相关关键技术测试工作,推进聚变遥操作维护技术在我所的不断提高,为未来聚变堆遥操作维护系统的搭建打下坚实基础。
未来聚变装置遥操作技术研究
中国聚变工程实验反应堆(CFETR)作为未来聚变实验装置,其反应堆的堆芯部件(装置主机、内部部件、窗口插件等)在运行过程中会受到放射性和有毒物质的污染,对其遥操作维护系统进行深入研究与开发是推进核聚变实验堆成功运行的关键。遥操作系统主要包括真空室内多功能维护机械臂系统、包层RH系统、偏滤器RH系统、遥操作部件转运系统以及热室(Hot cell)系统等。
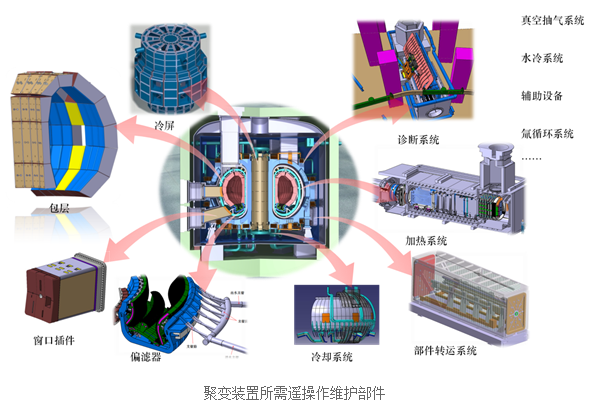
未来聚变装置主要遥操作维护系统
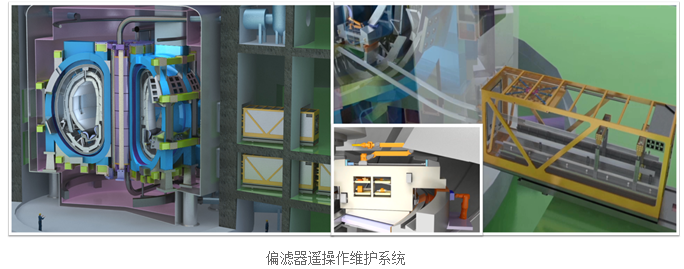
偏滤器遥操作维护系统 (Divertor Remote Handling System)主要完成偏滤器的安装和拆卸;装置运行过程中产生的灰尘和碎屑进行清理;偏滤器以及诊断设备在主机大厅和热室之间的转移。偏滤器维护系统的研究需要满足在强辐照环境、复杂工作环境下可靠运行,实现高精度、高可靠性,能够灵活实现偏滤器拆卸、更换、传送以及冷却管切割、焊接等维护作业。
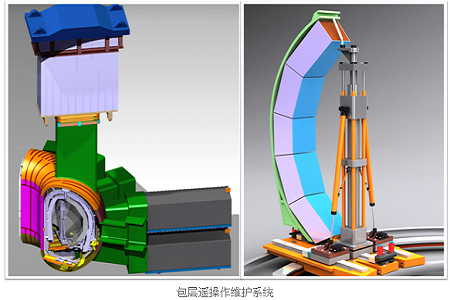
包层遥操作维护系统 (Blanket Remote Handling System)是一套有多个机构组成的复杂系统,在工作时多个机构合作完成对包层的拆卸、转运和安装等。为提高维护效率,将包层分为多个扇段模块进行维护,每个模块重达几十吨,高度近十米。在维护的过程中需要将包层管路进行切割、拆卸,利用利用垂直吊装机构将包层提升吊入上部CASK,然后运输到热室进行维护。
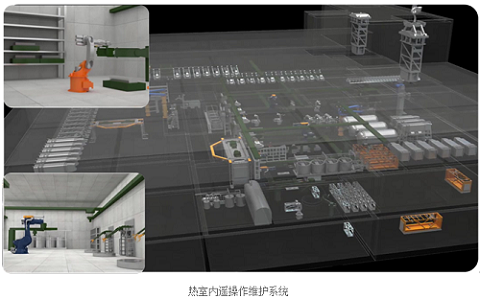
热室是涉及核辐射部件进行更换及维护的场所,是未来聚变堆部件维护的重要设施。主要用于提供托卡马克装置内部活化部件和材料的接收存储、检验、维护以及辐射废料的处理和遥操作工具的试验测试及维护等操作的场所。
所承担的课题
——国家磁约束核聚变能发展研究专项 聚变堆遥操作维护系统设计研究。
——国家磁约束核聚变能发展研究专项 EAST内部部件实时检测、分析及快速更换关键技术。
项目负责人:程勇、冯汉升。 目前团队共有约20名成员,其中副高级及以上研究员2人,博士生5人,硕士生2人。 主要参与人员:赵文龙、史善爽、杨洋、林玲珑、潘洪涛、张宇、李阳、魏小洋、庄严、张俊、孙拥军、詹俊程、郑磊等。
主要研究目标
依托中国已有的EAST大科学工程装置,结合ITER国际合作项目,在中国聚变工程实验堆CFETR概念设计的基础上,从系统安全性、兼容性、可操作性及可靠性角度进行聚变堆的遥操作维护系统集成设计及其关键技术的研发,掌握聚变堆遥操作维护核心技术,提升我国在聚变遥操作机器人领域的研究水平,为我国独立自主的建造聚变反应堆奠定坚实基础。
主要研究成果
1、Y.T. Song, J.G. Li, Y. X.Wan, B.N. Wan, P. Fu, X. Gao, B.J. Xiao, Y.P. Zhao, C.D. Hu, G. Gao, L.Q. Hu, X.Z. Gong, L.W. Xu, Y.Y. Huang, Y.W. Sun, B.K. Liu, X.J. Wang, J.S. Hu, Q.S. Hu, J.F. Zhuo, X. Ji, Q.X. Y, J.X. Zheng, S.K. Wang, Z.X. Chen and EAST Engineering Team, Concept design on RH maintenance of CFETR Tokamak Reactor, Fusion Engineering and Design 10/2014 ;
2、S.S Shi ,*, Y.T. Song , Y. Cheng H.S. Feng , C. Liu , E. Villedieu , V. Bruno , P. Pastor , S.U.D. Khan , H.J. Tang , J. Zhang , Y. Zhuang , Y.J. Sun , L. Zheng, Design and implementation of storage cask system for EAST Articulated Inspection Arm (AIA) robot, Journal of Fusion Energy February 2015 ;
3、Manfen HAN, Yantao SONG, Yong CHENG, Wenlong ZHAO, Jianghua WEI, Xiang JI, Conceptual Design and Analysis of Water Hydraulic Manipulator for CFETR Blanket Maintenance, Journal of Fusion Energy, January 2015;
4、Lin L, Yang Y, Song YT, Nemec B, Ude A, Rytz JA et al. , Peg-In-Hole Assembly under Uncertain Pose Estimation. Proceedings of The 11th World Congress on Intelligent Control and Automation. 2014;
5、Xiaoyang Wei; Yuntao Song; KunWang; Wenlong Zhao; Hongtao Pan; Yong Cheng, Motion Characteristic Research for the Flexible Multi-articulated Robotic Arm Applied in the Fusion Environment:Fusion Engineering and Design (Under review) ;
6、Wenlong Zhao, Yuntao Song, Huapeng Wu, Yong Cheng, Yang Li, Jianghua Wei, and CFETR Team, Concept design of the CFETR divertor remote handling system, Fusion Engineering and Design ;
7、Yang Yang, Linglong Lin, et al., Fast Programming of Peg-in-hole Actions by Human Demon-stration. International Conference on Mechatronics and Control. 2014;
8、一种用于复杂环境的多关节机械臂 201410179008.9 发明(设计)人:史善爽 宋云涛 潘洪涛 张宇 程勇 庄严 张俊 ;
9、一种用于核聚变装置包层转运的机构201410048008.5 发明(设计)人: 魏江华 宋云涛 裴坤 赵文龙 韩曼芬 唐红军 李阳 潘洪涛 魏小洋 王堃 程勇 ;
10、一种用于核聚变装置的可拆卸轨道连接机构201410046024.0 发明(设计)人:赵文龙 宋云涛 程勇 李阳 魏江华 裴坤 张宇 潘洪涛 魏小洋 王堃 ;
11、一种用于核聚变装置包层转运的机构2014100480085 发明(设计)人:魏江华 宋云涛 裴坤 赵文龙 韩曼芬 唐红军 李阳 潘洪涛 魏小洋 王堃 程勇 ;
12、一种用于核聚变装置颈管内部件转运的保护机构201410443986X 发明(设计)人: 魏江华 宋云涛 裴坤 赵文龙 程勇 李阳 潘洪涛 魏小洋 张宇。
- 上一篇:ITER PF6项目
- 下一篇:CFETR项目简介

